








philadelphia PENNSYLVANIA
Simon KIM talks about machine learning, modular robotics, rethinking Loos’s Raumplan, “retroactive futures,” and more.
[CLICK FOR SIMON KIM INTERVIEW]



images clockwise from top left: 4-2-1 House (IK Studio), Quarantine (IK Studio), Biomitten (Immersive Kinematics), Mechanical Garden (IK Studio).
suckerPUNCH: Can we start with a little bit of your background?
simon KIM: Sure. I received my graduate degree from the AA—this was in the DRL [Design Research Laboratory] program. Brett Steele was director, Patrik Schumacher was my thesis advisor and Mohsen Mostafavi was the chair of the school. Then, after that, having worked in London for a number of years at Zaha [Hadid]’s, I became really interested in computation and craft, beyond just formal technique, as well as looking into what was new in terms of interactive design. As a result I started looking around for programs that could fulfill that interest. And the one obvious place was MIT, so I went to visit, and decided to go ahead and do my postgrad there.
sP: During your time at the DRL, what was the focus? Isn’t it during your last year that a set focus is explored?
sK: The premise of the DRL when I was there was “Responsive Environments.” We were looking at modules within a larger systematic assembly, and we always worked at various scales, where you work on the leitmotifs of what these dynamic modules are and access the strength of each one. So we looked at a certain robustness, then tried to make taxonomies of these things, ultimately going back up in scale to the macro and seeing how they could actually deploy over a very large area, which for my team was the Barbican Center.
sP: When you shifted from the DRL to Zaha’s office, was that a time when design computation was already being used in her office?
sK: Yes, that was in 2003 and there was a vitality of computation and parametrics, as well as this kind of loose affiliation with almost everything scientific and mathematic in the world. Everything was up for review and investigation. And, at the time, I guess the big question was, How does computation become something that is architecturally relevant? or What does it mean for us as occupants or as city-dwellers? The notion that Zaha’s office is an extension of the DRL is a little wrong. I know that notion is widely played out, but in actuality Zaha’s is different because her office is one of the few where you can work from the smallest scale, say product design, to the very large, the master plan of entire cities. But it required a kind of persistence of research and development that was more than just quick form making. As someone trained in mathematics, she was never satisfied with an easy gesture.

sP: So from there you went to MIT?
sK: When I went to MIT, I was going under the impression I was an awesome RhinoScripter and that I was going to blow the doors off the place. What I quickly realized is that, at the wider institution of MIT, I knew very little. (I was in the Design Computation (Des-Comp) group, but then I started taking courses in computer science; Course 6 is what it’s called). I was being decimated by 19-year-old child prodigies who could code circles around me. And there I was, struggling to meet the deadlines. Every week there was a problem set, normally due Friday at noon, and I would be freaking out every Friday morning trying to get my answer compiled, somewhat working to compute orbits around Jupiter, and then submitted. So I had that grand exposure to just how little I knew. But I went to take courses at the Media Lab, and there were a couple of key figures there that entirely changed what I was interested in. I went from the higher-order and unbelievable possibilities of gymnastic plasticity of form and how it then gets resolved—whether it’s being rationalized or you actually go through all the mechanics of double curvature surfaces— into what were, perhaps, underlying premises of how you can actually be in control of the machine. And that led me, actually, more strongly to the work of physical computing. And that’s what I’m doing in my research to this day, a sort of human/machine interaction.
sP: So maybe we can get into Immersive Kinematics and some of the work you’re doing now, which I would assume is an extension of your earlier work at MIT.
sK: The Immersive Kinematics Group at PennDesign is less than a year old, it started in Fall 2010. The school has been very supportive of these collaborations. I’m a co-director, and I share that position with Mark Yim—I would say he’s one of the leading figures of modular robotics in the States, and he runs a lab in the Mechanical Engineering Department called the ModLab (Modular Robotics Lab). Together we share a premise that architecture and engineering are both domains of design. Engineering is maybe seen more formally, as a kind of applied science, whereas architecture is design untethered to any kind of physical restrictions, it seems. But we believe that there is a shared domain of what design means. For engineers, it could be that the design is actually metric, which can be seen through a fulfillment of criteria; that could be weight-to-strength ratios, or the fastest, the lightest, the cheapest—all these things have a kind of metric, so engineers can actually gain a finality to what their design means. And for architects design is even more speculative. From the perspective of an engineer watching how architects design, maybe it’s solving, or not solving but actually proposing, answers for which there is no question. But the idea of design persists, and we think that architecture is no longer necessarily a collection of static forms and inert geometries, that there is no reason why it can’t be active or have at least a layer of embodied intelligence to it. And, beyond the ‘intelligence’ of supermarket doors that open when you come close, systems and elements that can actually be more than a nonlinear, 1:1 correspondence, and that there is learning and agency. That’s really where machine learning is coming into it. We’re thinking of a building that could pulse or move—we’re actually writing a paper on that right now. All of our research is based around architecture that is beyond geometric formal play alone, yet still imbued with cultural meaning, still signifying, and has all the concerns of occupancy that architecture normally has, only now those concerns are active, moving, and changeable.
sP: When you’re talking about “pulse” and movement, I’m curious if it is more of an experiential, sensational exploration, like an affect, or if it is more a concern with performance and environmental control. I’m sure the goal is to take some of those concerns on, but is there a certain focus right now or an ambition behind the experiment?
sK: That’s a great question, because we draw lines or limits as to the scale of what those concerns are. Is it possible that the entire building is moving? Certainly there is a factor based on the square-cube law. And what’s the embodied energy for all that material? What’s the actual current required to actuate these things? So there are those questions, and then it could be perceptual or maybe even affective forms of these things. Certainly, regarding what you brought up as environmental technology, I would say I’m not that interested in “smarter” windows or louvers that will work better. I don’t negate the importance of performance, I just have other questions—questions of geometry, occupancy, culture, and meaning. And if it’s in the window where we find these issues, then that is certainly valid. But we don’t start with, “We need to solve environmental, technological problems.”

sP: The question that comes to mind deals with the floor plan. I know the brief explanation of Mod Motion talks about questioning the Raumplan and that idea of space through starting to regulate and move those floors, and looks at how that movement would reconfigure that space.
sK: Thanks, because the whole idea of the modernist Raumplan—I think it was [Adolf] Loos that first brought it up—is that there’s a uniformity of the ground plane into which there can be any kind of matrix of human possibilities or occupancy. In Gerrit Rietveld’s Schröder House there are movable partitions, with this idea of extensibility and changeability that is, again, on this wide plane. In Mod Motion we were looking at floor slabs that could connect or disconnect locally. If you imagine a deep plan, a deep slab, we then carve up those slabs per bay and they can have changing local allegiances. It’s not as if the slab is perceptibly shaking so you feel unease, but that over time what is traditionally demarcated through walls is instead demarcated through gaps in a slab. So instead of vertical partitions that move, as in the Schröder House, it could possibly be these horizontal slabs that have local and changing separation. You could have separation into smaller slabs or aggregation into larger ones, so that in any deep slab—which is pretty much a norm now—we can introduce this kind of system where you have domains, camps, or user allegiances.
sP: I know you’ve also worked—with the theater project, for example—more at the scale of the body and designs that interact with the user more intimately. Maybe you can talk about that shift in scale, from designing something that is the size of the whole envelope to something that is more the size of the human body.
sK: There are several branches of what we consider to be our research projects, and one of them is “wearable computing,” (Wearables: Squidcrown and Biomitten). This is something that my partner [Mariana Ibañez] and I had a great experience doing for the Museum of Science in Boston, for a show called “Oh Sew Pretty.” And the kind of work we were doing—and some of it was in a theater show last year with Pig Iron—was actors wearing prosthetic devices. Our Clothing/Cladding project went further to suggest that these wearables could also tile with others to become building envelopes. But these things were highly sophisticated and designed outfits that you and I could wear, with all the cultural associations or markers of what garments stand for in terms of our branding or our identity. We were thinking that we could actually augment these identities or even augment physical manners, so there could be, for example, wearable constructs that allow for you to express behavior or identity. And all this could be done through simple augmentation of things that move, or even digital signals that could be sent between people wearing like garments. So, in a way, I enjoyed that, because there was a whole fascination with social systems theory in the ’70s and with Niklas Luhmann that can still be reclaimed. And architects also enjoy design at every level—it was [Henry] van de Velde who designed the clothes his occupants should wear in the house he designs for them. I like the idea that you can wear things that change mannerisms. For example, we don’t have horns and we don’t have tails, so we don’t have those modes of expression. We can certainly do things that help us to communicate beyond what is already a rich lexicon of hand gestures, facial expressions, and body positions. The challenge is in communicating with non-human agents who don’t recognize local etiquette.

sP: It’s this kind of additional layer to your body that you have some control over, which at the same time gives you something you didn’t have before—a kind of pure extension. Are there any other Immersive Kinematic projects worth mentioning?
sK: Well, Mark and I are working through a modular robotic architecture. His unique field of expertise is in small modules, self-similar to each other, that when joined together can come together in different ways, can reconfigure, and are active, so that they can be of different forms for different criteria or scenarios. A simple example would be that these modules can chain together as a snake-like collection, so that they can move in a snake-like or a caterpillar-like way, but, at the same time, those same modules can then reconfigure to create a quadruped, a biped, or join up in a closed loop so that the aggregation can roll. And there’s endless fascination for us, as architects, to see that these things can do the same at a larger scale—certainly that promise has been put forward from, let’s say, post-war Archigram and those amazing “walking cities.” But Walking City talks about machines in a limited, predetermined way—it’s a closed alley kind of design because you’re designing fixed machines that look a certain way, act a certain way, and there is a singularity to what they do, whereas modular robotics holds the promise of being multiple things, or any number of things for any given scenario. Who knows what kind of terrain you might encounter that makes you need to change your gait. So I find that work to be fascinating. We can actually promote this as an architectural idea, asking, Why is it that these modules can’t be large enough for human occupancy, and therefore, actually lead to an entirely new way to thinking about buildings that are no longer rooted in place, but which can instead move along over time? And that buildings don’t have to be the same configuration, so that these modules as singles can be small units, but when chained or clustered together—very much like Mat Urbanism—can become more than just one thing.

sP: The video I really enjoyed was where they’re kicking the modular robot as it’s walking and its modules break apart, only to come and find each other, put themselves back together, and resumes the task they were doing before that moment of impact.
sK: Yeah! The whole validity of robotics is that it can be used for search and rescue or for military operations as well—diffusing bombs, for example—and that you’re doing all this at a tele distance. For the modular robot that can be kicked apart—and I’m completely bastardizing what Mark does and making wild extrapolations—he was using Robot Vision, so in the scenario where this thing is walking along and somehow, suddenly, it breaks its chain, that doesn’t mean it’s the end of the operation. These modules can then look for each other, start to hunt for like pieces, and come back together to resume its functions. Therefore, the simple and quite easy act of things falling apart isn’t the death of the operation.
sP: It’s interesting, too, how the ideas go in cycles. Modular robotics brings up the Metabolists, the “unit,” and this notion of scaling. But it becomes much different now, because instead of modules being purely repeated or self-similar, they also, it seems you’re saying, can start to act on their own. If you start to talk about the single versus the overall, it’s not just about accumulation; there are also different configurations and results that have come out of that.
sK: We seem to be in a socio-economic time where it’s difficult to make grand schemes. So, where it was possible for Alison Smithson to talk easily about Mat Urbanism or for Kenzo Tange to do his enormous Tokyo Bay experiment, I don’t know that we can have modular robotic architecture that can become entire cities. I hesitate to say that; given the worst, in a plural society as exists now, there’s no single matrix of truth, and such a singular vision could hardly be accepted.
sP: Well, it’s interesting to think about that because of scale. They are similar ideas but the scale of those projects is entirely different. It’s like you were saying: the Golden Lane Housing was sitting over the top of the entirety of London in skyways. So it’s interesting to take those ideas of accumulation and explorations of the unit, but not look at them with such megalomania, as this kind of taking-over-the-whole-city, to instead consider what they could mean for a single house or a single block.
sK: Yeah. Since we’re talking about it, somehow it could be that this modular robotic architecture—and I have no better word for it, I need a catchphrase—but that modular robotic architecture could somehow shift and be more than just novel, so that there are times when it becomes a clinic, times it becomes a school, times it becomes individual housing. That’s where there’s a kind of reconfiguration that is available, so that it’s not “one module / two module / eight module / sixteen,” but that instead there are inbuilt scenarios where modular robotic architecture can arrange itself to serve civic functions as courts, schools, or hospitals. And there’s not some kind of belief that in perpetuity it must always be a house. Given the fact that the owners of the house might be changing continuously from one child to four, suddenly with modular robotics the house is more than just one singular expression.
")
sP: Perhaps we could talk about the installation you proposed for a gallery in China. It was a surface that dealt with controlling air and how close you could be an infected individual if there was an airborne emergency or outbreak.
sK: That was a project that Mariana Ibañez and I did. We were invited by the National Art Museum of China (NAMOC), along with a group of 12 architects from around the world—from France, Scandinavia, Latin America, the States, and so on. We were asked to think about any disaster, and we were free to come up with our own, so there were some nice ones. We were looking at the Avian Influenza (Bird Flu) pandemic, because in Toronto in, I think it was 2001, the Avian Flu came and made everybody, very suddenly, really afraid of Asians. So we did something that was basically a quarantine house; that was our response to a pandemic that was viral or airborne. We could actually make these quarantines so that they were single modules that could be clustered together, were quickly deployable, fast to construct, and made out of readily accessible scaffolding. And we were thinking that in the fabric tensile membrane, which was the enclosure, we could actually have sewn into it—if you imagine that there is a textile aspect to it now—pockets for the rationing of pills and food, so the people in quarantine have access to the medication that they require, and at the same time, through this elastic membrane, the human interaction with the loved ones that is so desired.
sP: It was really interesting because it not only took this really beautiful, complex geometry, but also used that same geometry to create the barrier and play with denoting the thresholds or how close one could get.
sK: It worked really well, because for the people inside, they could obviously still see and touch—not hug, but still have closeness with—the people on the other side. And that complex geometry you’re talking about was amazing. We designed it using all the state of the art “solvers” for cloth, stitching it together to basically control it, so that in all the positive and negative curvatures there was no wrinkling happening. A single module had to be made out of 80 square meters of fabric, which is not trivial. So in the design of it we thought we had it figured out, but once it went to China and went into fabrication we had a team of seamstresses working for four days straight—all they cared about was receiving an 8.5 by 11 catalogue of shapes with dimensions on them, and that’s what they used to put the whole thing together. And then, of course, the fabric that we specified wasn’t available, so we went to another one. In the end some of the geometry was a little loose and we had to basically tie it tighter with these old-school ratchets. But, thankfully, it all still worked out.

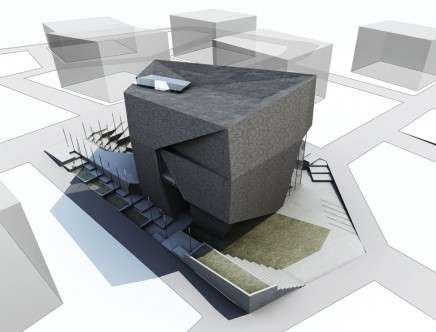
sP: And what about the Ordos House? I know you were dealing with, besides the vectors and geometries, an interesting play with the division of domestic spaces.
sK: Right. Mariana and I had a strategy of cross products. That was really interesting, to understand that there is a relationship vertically to what is being understood as the domain. What could be a room, or the size of the room, rather, can actually have a mathematical relationship with how high the ceiling is, for example, and with how sharp its angles get. But beyond just mathematical fascination, it had to be a working house. The program was of an unusually large size—both the number of rooms and the overall pragmatic needs—and it fit really well into a bifurcation scheme. We actually saw, when we laid out all the occupancies, that the groups were generally a four-two-one progression, so we used that. (House 4-2-1 is composed in a movement of four to two to one that progress from the ground where there are four separate towers that climb upwards to two towers, and combine into the final, single level.) We organized it vertically on the site so that what was, in a sense, the terrain that we made for the vectors, the cross-products, could actually be fit into these four, to two, to ultimately the one level on top. And that was a great move—Mariana figured that part out—because after a lot of struggle in designing a good home with a high-level parti, the rest of it worked itself out really well in terms of where the openings were and how the circulation was arranged. And it’s also intriguing because the challenge to design this home was exactly that we didn’t know what the neighbors looked like. We did know that our site was bound on all sides, but we had no reference, so how do you design in that manner? We decided that bifurcation was a good scenario internally, and the four-two-one progression gave us flexibility as far as where we located the four, the two, and the one. We could actually determine sight lines—we didn’t know what the other houses looked like, but we certainly knew where they were positioned—using the placement of four-two-one to suggest that when close to the neighboring house there’s less opening, and at the corner, where there’s a great view outward, we could make a big opening.
")
sP: I know for the last 20 years, probably since your time at the AA, the idea of interactivity has been floating around, and sometimes it’s used more interestingly, sometimes not. The last thing I was going to ask is if you see certain potentials, or places where ambitions for interactivity are falling short. And also, in light of recent mass-culture adoption of things like gestural gaming—like the Kinect or 3-D movies—whether people are interested in going beyond the screen or the ways we traditionally think of interacting.
sK: Well, that’s great. Interaction is great. It’s a great word—it’s really loaded and it promises a lot. It’s also not really a domain controlled by architects.
sP: It’s talked about by architects.
sK: It’s talked about by architects and we have a kind of outsider’s fascination with it. But it’s always being engineered. It’s being engineered and the design of it is not ours. So when this interaction aspect comes to architecture, and it certainly will, who is going to be in control of it? That’s a domain and opportunity that I find - if we don’t accept it now and take it on before it becomes ubiquitous - we will lose like we’ve lost other opportunities. We gave away a lot of site supervision to construction managers, we gave a lot of the domains that we originally controlled to other specialties. And so now, with this “interaction” specialty coming into the discipline—and it’s an extremely powerful one—we should actually accept it as part of our domain, as part of our curriculum. And I know exactly what you mean in terms of failed events, but it’s because interaction is so new. If you look at the trajectory of technology, it’s a vector that is exponential in shape; it advances so quickly over so little time that, in a way, a lot of mistakes are being made. But over time, these mistakes get folded into something that, ultimately, becomes better.
sP: Are there any influences that you see, over time, as having been important for your work or your development?
sK: Oh, right! Yes. Okay. I’d be remiss not to say that I am very aware of what is going on with offices where I’ve worked. So that would be Zaha Hadid [Architects] and the offices of Frank Gehry, particularly Gehry Technologies. Cecil Balmond for whom Mariana worked. A strong influence on my work is Gordon Pask, a cyberneticist who also taught at the AA, which makes him practically a unicorn in our zoology. Also, Reyner Banham’s theories have been really influential and never seem outdated. And I’m reading The Autopoiesis of Architecture by [Patrik] Schumacher. In terms of music, I listen to bands from the 1960s and ’70s. I listen to a lot of Jimi Hendrix. I don’t know if that shapes the way I think, but I just love what he did with the guitar and what he did with sound. And then, also in terms of sound, Brian Eno is someone huge. The work that he did right after Roxy Music is as amazing as all the stuff he was doing with stochastics and chintz.

sP: I wonder if there is any fiction that overlaps with your interest in progressive technology or robotics, or any pop culture, such as film?
sK: Ballard, but everybody loves Ballard, so I feel like I don’t have any rights to him anymore.
sP: Our future is still based on the ’68–’82 idea of the future. It’s like the new future hasn’t been written.
sK: And it always seems to be wrapped in plastic—smart plastic. The one Ballard story no one really talks about, though, is in a small collection. It’s called “A Thousand Dreams of Stella Vista”—that’s the name of the short story— and the book is Vermillion Sands. But it’s about a house that is, I think psychotropic is the word that he uses. And it’s brilliant. It’s really, really amazing and it’s more than just a fascination with changeable blob geometries that can move. It’s got a lot to do with psychoses and personalities that move, as a trait, from owner to domicile. It’s a great story. Movies . . . What did you think of Tron?
sP: I think Tron would have been really fantastic if it had no dialogue and they condensed it down to a 30-minute music video, just pulsing music, and encouraged you to go to the theater out of your head. The visuals, I thought, were really great.
sK: It’s Joseph Kosinsky, right, who was a Columbia grad and founder from KDLAB? The movie is beautiful, the story is hard to follow. But it’s true that, as a kind of, let’s say extended short film with Daft Punk as the soundtrack, it would be fantastic. Actually, do you know Autechre? There was this video that came out in the early ’90s called “Gantz Graf,” and it’s all pulsating, frenetic 3-D objects that move with the sound. It’s unbelievable. I actually still show that to students, despite the video being almost 18 years old.
sP: Yeah, I think our future is still lingering.
sK: Maybe “retroactive futures” is another way to think about it.
sP: The last question I’ll ask you is: Anyone’s work that is currently on your radar?
sK: Right. I’ll do a shout-out to my friends. Nick Puckett from Alt N who graduated from the AA with us and doing material research. Marc Fornes/THEVERYMANY and Skylar Tibbits , who are prime examples of a certain category of scripting to fabrication. Ball-Nogues [Studio], in terms of really beautiful, smart making. George Liaropoulos-Legendre. Who else do I like? Sou Fujimoto, because he’s coming at architecture from an entirely different way of thinking and because of the weird sets of relationships he puts into play. And then geometry is nothing more than a resultant. Well, it does underpin what his relationships are, but it serves as a carriage and not as a primary generator. Who are the people that are doing robotics or machines in architecture these days?
sP: That’s what I’m here to ask you . . .
sK: I mean, although they are not architects, MIT’s Media Lab is interesting. Well, some groups far more than others, but it’s certainly interesting as an institution. The AA is doing amazing things, although they don’t have the same level of technology. They set this incredible ambition and then through fits and starts students try to hack things to somewhat work. But whatever it is that they do get to work, they make the ultimate expression of it graphically and through architectural design. At the CCA there’s Casey Reas . . .
sP: Yeah, he and Ben Fry did the early Processing stuff.
sK: Yeah, they are the two that developed it. Jason Johnson is also over at the CCA—his Future Cities work is inventive (I’m talking purely academic research groups now). What else is out there? The ETH. Kas Oosterhuis and his Hyper-Body organization. At MIT I overlapped with Axel Killian one semester and he taught a class that was exceptional. Meejin Yoon is another friend from MIT whose work I admire. Actually, I would conclude by saying that more institutions are fostering a curriculum with architecture as dynamic environment which is promising.





